โปรเจค รถบังคับ Arduino กับ แอพแอนดรอยด์
4 ปีที่ผ่านมา

เราจะเอาสิ่งที่เราเรียนรู้ Arduino จากที่่ผ่านๆมา มาประกอบเป็นรถบังคับ ควบคุมด้วย สมาร์ทโฟน แอนดรอยด์ ผ่านทาง Bluetooth HC-05 กันนะครับ
โปรเจครถบังคับ ขับเคลื่อน 2 ล้อ Arduino กับ แอพแอนดรอยด์ อุปกรณ์ที่ต้องใช้ก็คือ
1. 2WD Smart Car Robot Chassis Kits
2. Arduino UNO R3 - Made in italy
3. Motor Drive Module L298N
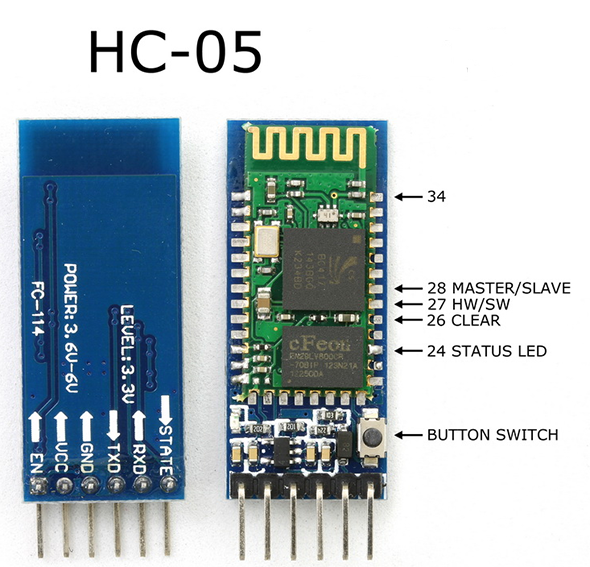
4. HC-05 Bluetooth Master Slave
5. สาย Jumper Female to Male ยาว 20cm.
6. สาย Jumper Male to Male ยาว 20cm.
7. รางถ่านแบบ 18650 ใส่ถ่าน 3 ก้อน
8. แบตเตอรี่ลิเธียม 18650 จำนวน 3 ก้อน
9. เสารองแผ่นพีซีบีโลหะแบบเหลี่ยม 6 mm
10. สายไฟแดงดำ ขนาด 22AWG
เริ่มต้นด้วยการ ประกอบ Smart Robot Car Chassis Kit



แนะนำให้ใช้แบตเตอรี่ลิเธียม 18650 (ขนาดใหญ่กว่า แบตเตอรี่ ขนาด AA ปรกติ) แรงดันไฟเฉลี่ย 3.7V (3400 mAh) จำนวน 3 ก้อน ได้ไฟรวมประมาณ 11.1 โวลต์ และ ก็ต้องเปลี่ยน รางถ่าน เป็นแบบ 18650 ใส่ถ่านได้ 3 ก้อน แบบวงจรอนุกรม ด้วย
รุูจัก : Li-ion (ลิเธี่ยมไอออน) และ Li-Mn (ลิเธี่ยมแมงกานีส หรือเรียกอีกอย่างว่า High Drain) ขนาดของตัวจะมาเป็นรหัสครับเช่น 18650 ข้อดี คือ สามารถชาร์จได้ แต่ ไม่ควรใช้จนไฟหมดหรือแรงดันต่ำกว่าที่กำหนดเอาไว้เพราะจะทำให้เซลล์แบตฯ เสียหายไม่สามารถนำมาใช้ได้อีก


V คือ Volt (โวลต์) เป็นค่าความต่างศักดิ์ไฟฟ้า คล้ายๆแรงดันไฟ นึกภาพถึง แรงดันน้ำ แรงดันลม ความดันเลือด (เป็นแรงดันไฟ หรือ แรงดันไฟฟ้า)
mAh คือ m = มิลลิ , A = แอมป์ , h = ชั่วโมง หมายถึง ถ่านก้อนนี้สามารถจ่ายกระแสได้ กี่มิลิแอมป์ ใน 1 ชั่วโมง (เป็นความจุไฟ หรือ กระแสไฟฟ้า)
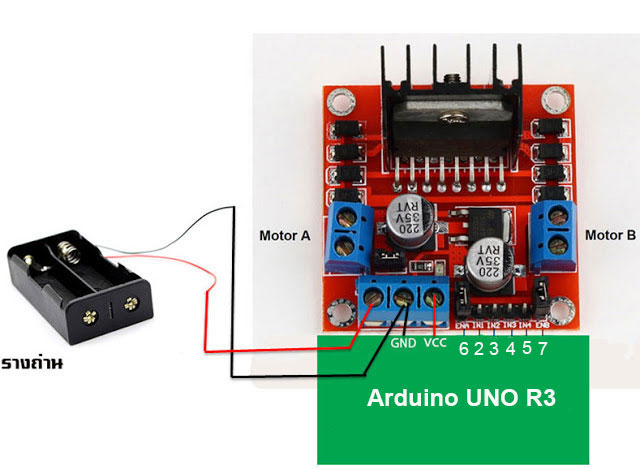
เริ่มด้วย ต่อวงจร Arduino UNO กับ L298N Motor Driver ตามรูปการต่อวงวงจร
นำไฟจากแบตเตอรี่ลิเธียม 18650 ไปต่อตรงกับ L298N Motor Driver (ไม่ต่อกับ พอร์ต Power Supply ของ บอร์ด Arduino UNO R3 ) และ นำไฟ 5 โวลต์ ที่ออกจาก L298N Motor Driver ต่อออกไปเลี้ยง บอร์ด Arduino UNO R3 ตามรูปการต่อวงวงจร

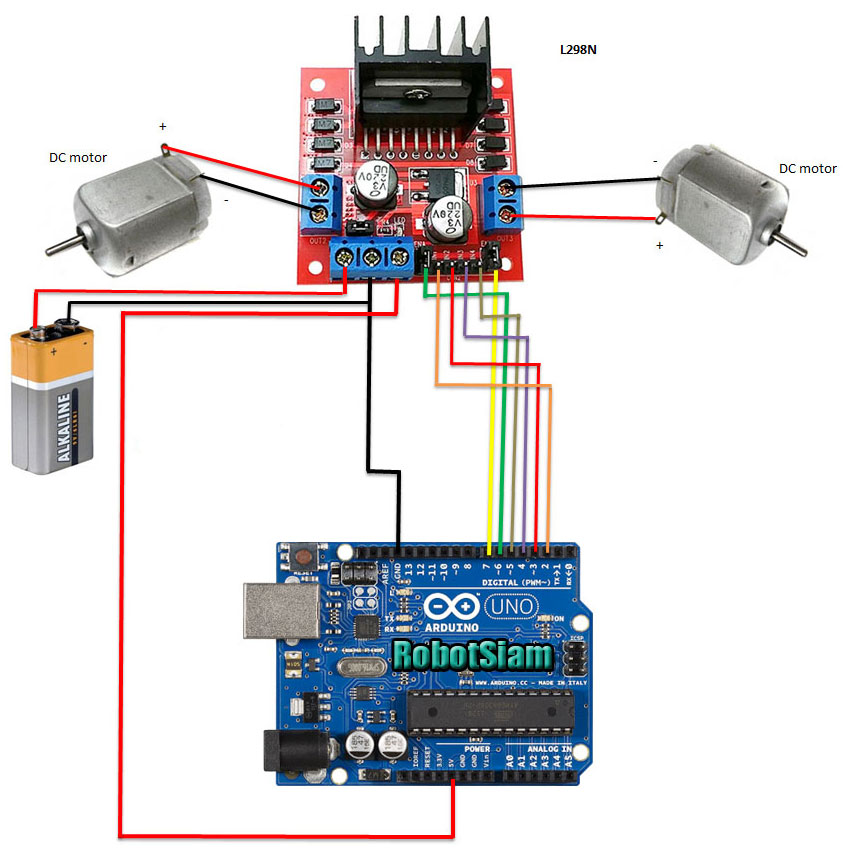
*** VCC ของ Arduino UNO R3 คือ 5V ***
เรียนรู้เพิ่มเติมตามลิงค์นี้ http://robotsiam.blogspot.com/2016/08/l298n-motor-driver-connect-arduino-r3.html
*** ถ้า HC-05 ไม่ทำงาน ให้ ทดลอง กดที่ปุ่ม BUTTON SWITCH ของ HC-05 ***
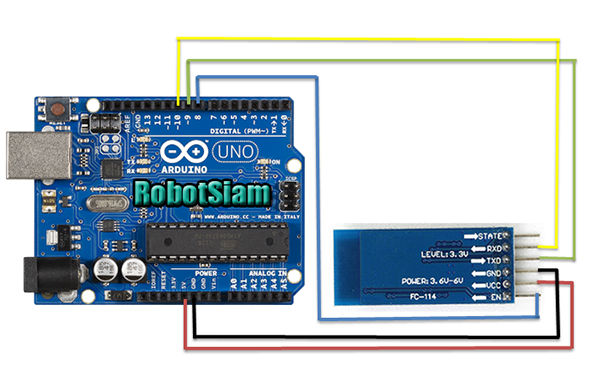
เรียนรู้เพิ่มเติมตามลิงค์นี้ http://robotsiam.blogspot.com/2016/08/hc-05-bluetooth-module.html
เปิดโปรแกรม Arduino (IDE) เขียน โค้ด และ Upload ไปยังบอร์ด Arduino UNO ดังนี้
#include <SoftwareSerial.h>
SoftwareSerial BTSerial(9, 10);
int dir1PinA = 2;
int dir2PinA = 3;
int speedPinA = 6;
int dir1PinB = 4;
int dir2PinB = 5;
int speedPinB = 7;
void setup()
{
Serial.begin(9600);
pinMode(dir1PinA,OUTPUT);
pinMode(dir2PinA,OUTPUT);
pinMode(speedPinA,OUTPUT);
pinMode(dir1PinB,OUTPUT);
pinMode(dir2PinB,OUTPUT);
pinMode(speedPinB,OUTPUT);
pinMode(8,OUTPUT);
digitalWrite(8, HIGH);
Serial.begin(9600);
BTSerial.begin(9600);
}
void loop()
{
if (BTSerial.available())
Serial.write(BTSerial.read());
if (Serial.available())
BTSerial.write(Serial.read());
if (BTSerial.available() > 0) {
int inByte = BTSerial.read();
int speed;
switch (inByte) {
case 'F':
analogWrite(speedPinA, 255);
analogWrite(speedPinB, 255);
digitalWrite(dir1PinA, LOW);
digitalWrite(dir1PinB, HIGH);
digitalWrite(dir2PinA, HIGH);
digitalWrite(dir2PinB, LOW);
Serial.println("Motor 1 Forward");
Serial.println("Motor 2 Forward");
Serial.println(" ");
break;
case 'S':
analogWrite(speedPinA, 0);
digitalWrite(dir1PinA, LOW);
digitalWrite(dir2PinA, HIGH);
Serial.println("Motor 1 Stop");
analogWrite(speedPinB, 0);
digitalWrite(dir1PinB, LOW);
digitalWrite(dir2PinB, HIGH);
Serial.println("Motor 2 Stop");
Serial.println(" ");
break;
case 'B':
analogWrite(speedPinA, 255);
digitalWrite(dir1PinA, HIGH);
digitalWrite(dir2PinA, LOW);
Serial.println("Motor 1 Back");
analogWrite(speedPinB, 255);
digitalWrite(dir1PinB, LOW);
digitalWrite(dir2PinB, HIGH);
Serial.println("Motor 2 Back");
Serial.println(" ");
break;
case 'L':
analogWrite(speedPinA, 0);
digitalWrite(dir1PinA, LOW);
digitalWrite(dir2PinA, HIGH);
Serial.println("Motor 1 Left");
analogWrite(speedPinB, 255);
digitalWrite(dir1PinB, HIGH);
digitalWrite(dir2PinB, LOW);
Serial.println("Motor 2 Left");
Serial.println(" ");
break;
case 'R':
analogWrite(speedPinA, 255);
digitalWrite(dir1PinA, LOW);
digitalWrite(dir2PinA, HIGH);
Serial.println("Motor 1 Right");
analogWrite(speedPinB, 0);
digitalWrite(dir1PinB, LOW);
digitalWrite(dir2PinB, HIGH);
Serial.println("Motor 2 Right");
Serial.println(" ");
break;
case 'I':
analogWrite(speedPinA, 150);
digitalWrite(dir1PinA, LOW);
digitalWrite(dir2PinA, HIGH);
Serial.println("Motor 1 Forward L");
analogWrite(speedPinB, 255);
digitalWrite(dir1PinB, HIGH);
digitalWrite(dir2PinB, LOW);
Serial.println("Motor 2 Forward L");
Serial.println(" ");
break;
case 'G':
analogWrite(speedPinA, 255);
digitalWrite(dir1PinA, LOW);
digitalWrite(dir2PinA, HIGH);
Serial.println("Motor 1 Forward R");
analogWrite(speedPinB, 150);
digitalWrite(dir1PinB, HIGH);
digitalWrite(dir2PinB, LOW);
Serial.println("Motor 2 Forward R");
Serial.println(" ");
break;
case 'J':
analogWrite(speedPinA, 200);
digitalWrite(dir1PinA, HIGH);
digitalWrite(dir2PinA, LOW);
Serial.println("Motor 1 Back L");
analogWrite(speedPinB, 255);
digitalWrite(dir1PinB, LOW);
digitalWrite(dir2PinB, HIGH);
Serial.println("Motor 2 Back L");
Serial.println(" ");
break;
case 'H':
analogWrite(speedPinA, 255);
digitalWrite(dir1PinA, HIGH);
digitalWrite(dir2PinA, LOW);
Serial.println("Motor 1 Back R");
analogWrite(speedPinB, 200);
digitalWrite(dir1PinB, LOW);
digitalWrite(dir2PinB, HIGH);
Serial.println("Motor 2 Back R");
Serial.println(" ");
break;
default:
for (int thisPin = 2; thisPin < 11; thisPin++)
{
digitalWrite(thisPin, LOW);
}
}
}
}
ประโยค switch หนึ่งประโยคจะมีกี่ case ก็ได้ หรือไม่มีเลยก็ได้ และอาจมี default เป็นตัวเลือกเสริม
ประโยคคำสั่ง break
เป็นคำสั่งที่ใช้ในการหลุดออกจากเงื่อนไข โดยไม่ต้องทำงานจนจบบล๊อกของคำสั่ง
การนำคำสั่ง break มาซ้อนไว้ใน case ต่าง ๆ ของคำสั่ง switch จะช่วยให้โปรแกรมไม่ล่วงล้ำเข้าไปทำใน case ที่อยู่ถัดไป แต่ถ้าไม่มีประโยคคำสั่ง break เมื่อทำ case ใด ๆ เสร็จเรียบร้อยแล้ว คอมไพล์เลอร์ก็จะให้ไปทำใน case ที่อยู่ถัดไปเรื่อย ๆ จนกว่าจะจบบล๊อกของประโยคคำสั่ง switch จากนั้นจะทำงานต่อไป ในประโยคคำสั่งที่อยู่ถัดไป
SoftwareSerial BTSerial(9, 10);
int dir1PinA = 2;
int dir2PinA = 3;
int speedPinA = 6;
int dir1PinB = 4;
int dir2PinB = 5;
int speedPinB = 7;
void setup()
{
Serial.begin(9600);
pinMode(dir1PinA,OUTPUT);
pinMode(dir2PinA,OUTPUT);
pinMode(speedPinA,OUTPUT);
pinMode(dir1PinB,OUTPUT);
pinMode(dir2PinB,OUTPUT);
pinMode(speedPinB,OUTPUT);
pinMode(8,OUTPUT);
digitalWrite(8, HIGH);
Serial.begin(9600);
BTSerial.begin(9600);
}
void loop()
{
if (BTSerial.available())
Serial.write(BTSerial.read());
if (Serial.available())
BTSerial.write(Serial.read());
if (BTSerial.available() > 0) {
int inByte = BTSerial.read();
int speed;
switch (inByte) {
case 'F':
analogWrite(speedPinA, 255);
analogWrite(speedPinB, 255);
digitalWrite(dir1PinA, LOW);
digitalWrite(dir1PinB, HIGH);
digitalWrite(dir2PinA, HIGH);
digitalWrite(dir2PinB, LOW);
Serial.println("Motor 1 Forward");
Serial.println("Motor 2 Forward");
Serial.println(" ");
break;
case 'S':
analogWrite(speedPinA, 0);
digitalWrite(dir1PinA, LOW);
digitalWrite(dir2PinA, HIGH);
Serial.println("Motor 1 Stop");
analogWrite(speedPinB, 0);
digitalWrite(dir1PinB, LOW);
digitalWrite(dir2PinB, HIGH);
Serial.println("Motor 2 Stop");
Serial.println(" ");
break;
case 'B':
analogWrite(speedPinA, 255);
digitalWrite(dir1PinA, HIGH);
digitalWrite(dir2PinA, LOW);
Serial.println("Motor 1 Back");
analogWrite(speedPinB, 255);
digitalWrite(dir1PinB, LOW);
digitalWrite(dir2PinB, HIGH);
Serial.println("Motor 2 Back");
Serial.println(" ");
break;
case 'L':
analogWrite(speedPinA, 0);
digitalWrite(dir1PinA, LOW);
digitalWrite(dir2PinA, HIGH);
Serial.println("Motor 1 Left");
analogWrite(speedPinB, 255);
digitalWrite(dir1PinB, HIGH);
digitalWrite(dir2PinB, LOW);
Serial.println("Motor 2 Left");
Serial.println(" ");
break;
case 'R':
analogWrite(speedPinA, 255);
digitalWrite(dir1PinA, LOW);
digitalWrite(dir2PinA, HIGH);
Serial.println("Motor 1 Right");
analogWrite(speedPinB, 0);
digitalWrite(dir1PinB, LOW);
digitalWrite(dir2PinB, HIGH);
Serial.println("Motor 2 Right");
Serial.println(" ");
break;
case 'I':
analogWrite(speedPinA, 150);
digitalWrite(dir1PinA, LOW);
digitalWrite(dir2PinA, HIGH);
Serial.println("Motor 1 Forward L");
analogWrite(speedPinB, 255);
digitalWrite(dir1PinB, HIGH);
digitalWrite(dir2PinB, LOW);
Serial.println("Motor 2 Forward L");
Serial.println(" ");
break;
case 'G':
analogWrite(speedPinA, 255);
digitalWrite(dir1PinA, LOW);
digitalWrite(dir2PinA, HIGH);
Serial.println("Motor 1 Forward R");
analogWrite(speedPinB, 150);
digitalWrite(dir1PinB, HIGH);
digitalWrite(dir2PinB, LOW);
Serial.println("Motor 2 Forward R");
Serial.println(" ");
break;
case 'J':
analogWrite(speedPinA, 200);
digitalWrite(dir1PinA, HIGH);
digitalWrite(dir2PinA, LOW);
Serial.println("Motor 1 Back L");
analogWrite(speedPinB, 255);
digitalWrite(dir1PinB, LOW);
digitalWrite(dir2PinB, HIGH);
Serial.println("Motor 2 Back L");
Serial.println(" ");
break;
case 'H':
analogWrite(speedPinA, 255);
digitalWrite(dir1PinA, HIGH);
digitalWrite(dir2PinA, LOW);
Serial.println("Motor 1 Back R");
analogWrite(speedPinB, 200);
digitalWrite(dir1PinB, LOW);
digitalWrite(dir2PinB, HIGH);
Serial.println("Motor 2 Back R");
Serial.println(" ");
break;
default:
for (int thisPin = 2; thisPin < 11; thisPin++)
{
digitalWrite(thisPin, LOW);
}
}
}
}
เพิ่มเติมการเรียนรู้ ภาษา C
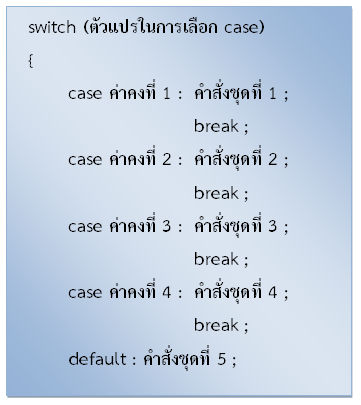
นอกจากการใช้คำสั่ง if เพื่อกำหนดเงื่อนไขเพื่อให้โปรแกรมเลือกที่จะทำงานสายงานใดแล้ว ในภาษา C ยังมีคำสั่ง switch อีกคำสั่งหนึ่ง เพื่ออำนวยความสะดวกแก่ผู้เขียนโปรแกรม ในการที่นำมาใช้แทนคำสั่ง if ที่ซ้อนกันหลาย ๆ ชั้น โดยที่คำสั่ง switch จะนำค่าของตัวแปรที่อยู่หลังคำสั่ง switch มาเปรียบเทียบกับค่าที่อยู่หลัง case แต่ละคำสั่ง ถ้าตรงกัน ก็จะทำสายงานที่อยู่ใน case นั้น ๆ แต่ถ้าไม่ตรงกับ case ใด ๆ เลย จะทำหลังคำสั่ง default โดยมีรูปแบบประโยคคำสั่งดังนี้
นอกจากการใช้คำสั่ง if เพื่อกำหนดเงื่อนไขเพื่อให้โปรแกรมเลือกที่จะทำงานสายงานใดแล้ว ในภาษา C ยังมีคำสั่ง switch อีกคำสั่งหนึ่ง เพื่ออำนวยความสะดวกแก่ผู้เขียนโปรแกรม ในการที่นำมาใช้แทนคำสั่ง if ที่ซ้อนกันหลาย ๆ ชั้น โดยที่คำสั่ง switch จะนำค่าของตัวแปรที่อยู่หลังคำสั่ง switch มาเปรียบเทียบกับค่าที่อยู่หลัง case แต่ละคำสั่ง ถ้าตรงกัน ก็จะทำสายงานที่อยู่ใน case นั้น ๆ แต่ถ้าไม่ตรงกับ case ใด ๆ เลย จะทำหลังคำสั่ง default โดยมีรูปแบบประโยคคำสั่งดังนี้
ประโยค switch หนึ่งประโยคจะมีกี่ case ก็ได้ หรือไม่มีเลยก็ได้ และอาจมี default เป็นตัวเลือกเสริม
ประโยคคำสั่ง break
เป็นคำสั่งที่ใช้ในการหลุดออกจากเงื่อนไข โดยไม่ต้องทำงานจนจบบล๊อกของคำสั่ง
ตัวอย่างตามโค้ดด้านบน เช่น
switch (inByte) {
case 'F':
analogWrite(speedPinA, 500);
analogWrite(speedPinB, 500);
digitalWrite(dir1PinA, LOW);
digitalWrite(dir1PinB, HIGH);
digitalWrite(dir2PinA, HIGH);
digitalWrite(dir2PinB, LOW);
Serial.println("Motor 1 Forward");
Serial.println("Motor 2 Forward");
Serial.println(" ");
break;
case 'H':
analogWrite(speedPinA, 500);
digitalWrite(dir1PinA, HIGH);
digitalWrite(dir2PinA, LOW);
Serial.println("Motor 1 Back R");
analogWrite(speedPinB, 200);
digitalWrite(dir1PinB, LOW);
digitalWrite(dir2PinB, HIGH);
Serial.println("Motor 2 Back R");
Serial.println(" ");
break;
default:
case 'F':
analogWrite(speedPinA, 500);
analogWrite(speedPinB, 500);
digitalWrite(dir1PinA, LOW);
digitalWrite(dir1PinB, HIGH);
digitalWrite(dir2PinA, HIGH);
digitalWrite(dir2PinB, LOW);
Serial.println("Motor 1 Forward");
Serial.println("Motor 2 Forward");
Serial.println(" ");
break;
case 'H':
analogWrite(speedPinA, 500);
digitalWrite(dir1PinA, HIGH);
digitalWrite(dir2PinA, LOW);
Serial.println("Motor 1 Back R");
analogWrite(speedPinB, 200);
digitalWrite(dir1PinB, LOW);
digitalWrite(dir2PinB, HIGH);
Serial.println("Motor 2 Back R");
Serial.println(" ");
break;
default:
การนำคำสั่ง break มาซ้อนไว้ใน case ต่าง ๆ ของคำสั่ง switch จะช่วยให้โปรแกรมไม่ล่วงล้ำเข้าไปทำใน case ที่อยู่ถัดไป แต่ถ้าไม่มีประโยคคำสั่ง break เมื่อทำ case ใด ๆ เสร็จเรียบร้อยแล้ว คอมไพล์เลอร์ก็จะให้ไปทำใน case ที่อยู่ถัดไปเรื่อย ๆ จนกว่าจะจบบล๊อกของประโยคคำสั่ง switch จากนั้นจะทำงานต่อไป ในประโยคคำสั่งที่อยู่ถัดไป

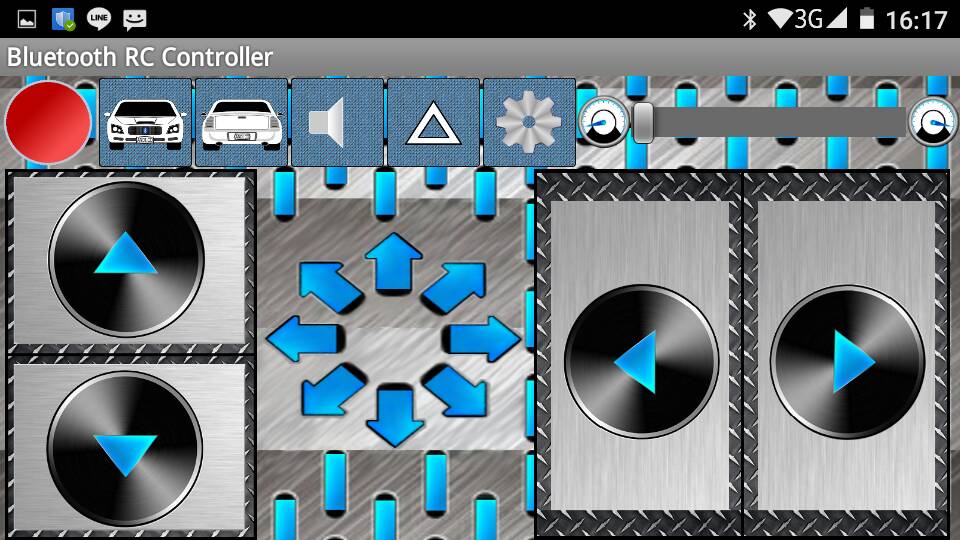
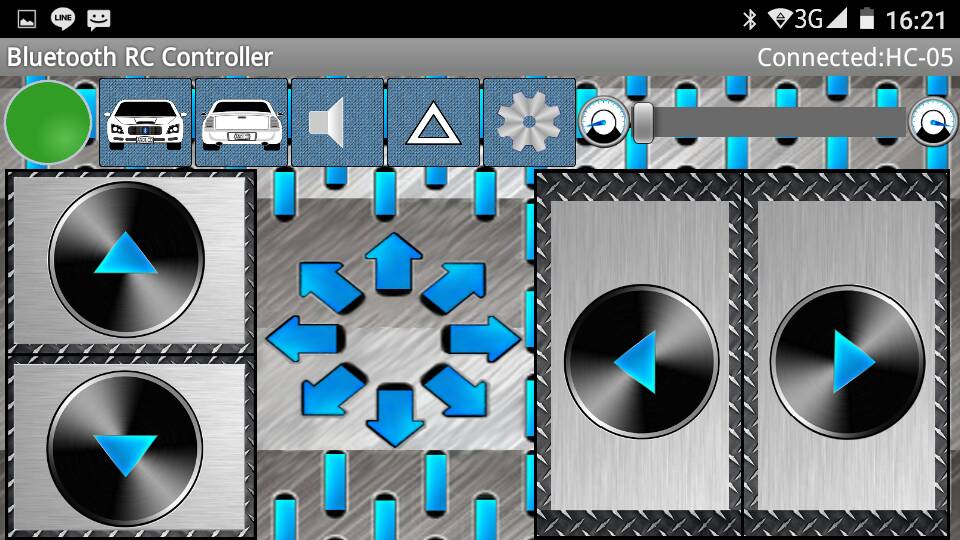
จากนั้น ทดลองนำ โทรศัพท์มือถือ แอนดรอยด์ เปิด บลูทูธ แล้ว ดาวน์โหลดและติดตั้ง โปรแกรม Arduino Bluetooth RC Car ที่ https://bluetooth-rc-car.en.softonic.com/android


สังเกตุ เมื่อเปิดขึ้นมา รูปวงกลมซ้ายมือ จะเป็นสีแดง
คลิกที่ ไอคอนเฟือง ขวามือสุด แล้ว เลือก Connect to car

เลือก HC-05 (ถ้าถามหา พาสเวิร์ด ให้คีย์ 1234)
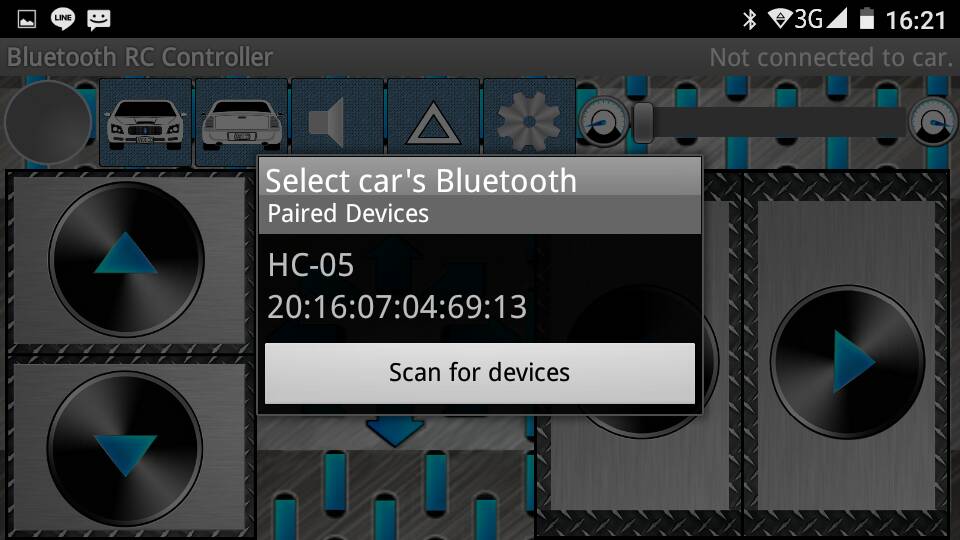
สังเกตุ รูปวงกลมซ้ายมือเป็นสีเขียวแสดงว่า โปรแกรมสามารถใช้งานได้แล้ว ทดลองควบคุมดูเลยครับ
วีดีโอผลลัพธ์การทำงานของ โปรเจครถบังคับ ขับเคลื่อน 2 ล้อ Arduino กับ แอพแอนดรอยด์
BLOG

โปรเจค หุ่นยนต์ Arduino 4in1 - บังคับด้วยแอพ / ควบคุมด้วยเสียงปรบมือ / เดินตามเส้น / หลบสิ่งกีดขวาง
1 สัปดาห์ที่ผ่านมา
ชุดคิท หุ่นยนต์ Arduino 4in1 - บังคับด้วยแอพ / ควบคุมด้วยเสียงปรบมือ / เดินตามเส้น / หลบสิ่งกีดขวาง แบบ DIY (มี ขั้นตอนวิธีทำ และ โค้ด)ชุดคิท หุ่นยนต์ Arduino 4in1 ชุดนี้ สามารถ ทดสอบ ทำโปรเจค ได้หลากหลายรูปแบบ เหมาะสำหรับ โรงเรียน สถานศึกษา ใช้ในการ…
1 สัปดาห์ที่ผ่านมา
ชุดคิท หุ่นยนต์ Arduino 4in1 - บังคับด้วยแอพ / ควบคุมด้วยเสียงปรบมือ / เดินตามเส้น / หลบสิ่งกีดขวาง แบบ DIY (มี ขั้นตอนวิธีทำ และ โค้ด)ชุดคิท หุ่นยนต์ Arduino 4in1 ชุดนี้ สามารถ ทดสอบ ทำโปรเจค ได้หลากหลายรูปแบบ เหมาะสำหรับ โรงเรียน สถานศึกษา ใช้ในการ…

โปรเจค หุ่นยนต์ ESP8266 3in1 - บังคับผ่าน WIFI / เดินตามเส้น / หลบสิ่งกีดขวาง
1 สัปดาห์ที่ผ่านมา
ชุดคิท หุ่นยนต์ ESP8266 3in1 - บังคับผ่าน WIFI / เดินตามเส้น / หลบสิ่งกีดขวาง แบบ DIY (มี ขั้นตอนวิธีทำ และ โค้ด)ชุดคิท หุ่นยนต์ ESP8266 V3 3in1 ชุดนี้ สามารถ ทดสอบ ทำโปรเจค ได้หลากหลายรูปแบบ เหมาะสำหรับ โรงเรียน สถานศึกษา ใช้ในการเรียนรู้การสร้างหุ่…
1 สัปดาห์ที่ผ่านมา
ชุดคิท หุ่นยนต์ ESP8266 3in1 - บังคับผ่าน WIFI / เดินตามเส้น / หลบสิ่งกีดขวาง แบบ DIY (มี ขั้นตอนวิธีทำ และ โค้ด)ชุดคิท หุ่นยนต์ ESP8266 V3 3in1 ชุดนี้ สามารถ ทดสอบ ทำโปรเจค ได้หลากหลายรูปแบบ เหมาะสำหรับ โรงเรียน สถานศึกษา ใช้ในการเรียนรู้การสร้างหุ่…
โปรเจค หุ่นยนต์ ESP32 4in1 - บังคับผ่าน Bluetooth / บังคับผ่าน WIFI / เดินตามเส้น / หลบสิ่งกีดขวาง
1 สัปดาห์ที่ผ่านมา
ชุดคิท หุ่นยนต์ ESP32 4in1 - บังคับผ่าน Bluetooth / บังคับผ่าน WIFI / เดินตามเส้น / หลบสิ่งกีดขวาง แบบ DIY (มี ขั้นตอนวิธีทำ และ โค้ด)ชุดคิท หุ่นยนต์ ESP32 4in1 ชุดนี้ สามารถ ทดสอบ ทำโปรเจค ได้หลากหลายรูปแบบ เหมาะสำหรับ โรงเรียน สถานศึกษา ใช้ในการเรี…
1 สัปดาห์ที่ผ่านมา
ชุดคิท หุ่นยนต์ ESP32 4in1 - บังคับผ่าน Bluetooth / บังคับผ่าน WIFI / เดินตามเส้น / หลบสิ่งกีดขวาง แบบ DIY (มี ขั้นตอนวิธีทำ และ โค้ด)ชุดคิท หุ่นยนต์ ESP32 4in1 ชุดนี้ สามารถ ทดสอบ ทำโปรเจค ได้หลากหลายรูปแบบ เหมาะสำหรับ โรงเรียน สถานศึกษา ใช้ในการเรี…

โปรเจค ESP32 เปิด-ปิดไฟ ผ่านอินเตอร์เน็ตด้วย ESP Rainmaker
5 เดือนที่ผ่านมา
ESP RainMaker เป็นแพลตฟอร์มที่ช่วยให้นักพัฒนาสร้างอุปกรณ์ที่เชื่อมต่อกับ ESP32-S2 SoC ของ Espressif โดยไม่ต้องวุ่นวายกับการจัดการโครงสร้างพื้นฐาน มี SDK ของอุปกรณ์ แอปโทรศัพท์ที่ปรับเปลี่ยนได้เอง มิดเดิลแวร์คลาวด์แบบโปร่งใส และยูทิลิตีโฮสต์เพื่อลดควา…
5 เดือนที่ผ่านมา
ESP RainMaker เป็นแพลตฟอร์มที่ช่วยให้นักพัฒนาสร้างอุปกรณ์ที่เชื่อมต่อกับ ESP32-S2 SoC ของ Espressif โดยไม่ต้องวุ่นวายกับการจัดการโครงสร้างพื้นฐาน มี SDK ของอุปกรณ์ แอปโทรศัพท์ที่ปรับเปลี่ยนได้เอง มิดเดิลแวร์คลาวด์แบบโปร่งใส และยูทิลิตีโฮสต์เพื่อลดควา…

โปรเจค Arduino เปิด-ปิดไฟ ด้วย โทรศัพท์ ผ่าน แอพบลูทูธ
5 เดือนที่ผ่านมา
โปรเจค Arduino: เปิด-ปิดไฟด้วย โทรศัพท์ ผ่าน แอพบลูทูธ การควบคุมการเปิด-ปิดไฟในบ้านหรือสถานที่ต่าง ๆ ได้ง่ายขึ้นด้วยการใช้ Arduino ร่วมกับบลูทูธ. ในบทความนี้, เราจะสร้างโปรเจคที่ใช้ Arduino เพื่อควบคุมไฟผ่านแอพบลูทูธบนโทรศัพท์มือถือของเรา. การทำโปรเจ…
5 เดือนที่ผ่านมา
โปรเจค Arduino: เปิด-ปิดไฟด้วย โทรศัพท์ ผ่าน แอพบลูทูธ การควบคุมการเปิด-ปิดไฟในบ้านหรือสถานที่ต่าง ๆ ได้ง่ายขึ้นด้วยการใช้ Arduino ร่วมกับบลูทูธ. ในบทความนี้, เราจะสร้างโปรเจคที่ใช้ Arduino เพื่อควบคุมไฟผ่านแอพบลูทูธบนโทรศัพท์มือถือของเรา. การทำโปรเจ…
โปรเจค Arduino ไฟฟ้าจากผลไม้ กับ หลอดไฟ 220 โวลต์
5 เดือนที่ผ่านมา
สอนทำโปรเจค Arduino ไฟฟ้าจากผลไม้ กับ หลอดไฟ 220 โวลต์ "ทดลองไฟฟ้าจากผลไม้" เป็นการทดลองทางวิทยาศาสตร์ที่น่าสนใจเพื่อศึกษาและทดสอบกระบวนการผลิตไฟฟ้าโดยใช้มันฝรั่งในฐานะวัตถุดิบหลัก. การทดลองนี้มุ่งเน้นการเรียนรู้และทำความเข้าใจถึงพลังงานที่เกิดขึ้นจา…
5 เดือนที่ผ่านมา
สอนทำโปรเจค Arduino ไฟฟ้าจากผลไม้ กับ หลอดไฟ 220 โวลต์ "ทดลองไฟฟ้าจากผลไม้" เป็นการทดลองทางวิทยาศาสตร์ที่น่าสนใจเพื่อศึกษาและทดสอบกระบวนการผลิตไฟฟ้าโดยใช้มันฝรั่งในฐานะวัตถุดิบหลัก. การทดลองนี้มุ่งเน้นการเรียนรู้และทำความเข้าใจถึงพลังงานที่เกิดขึ้นจา…
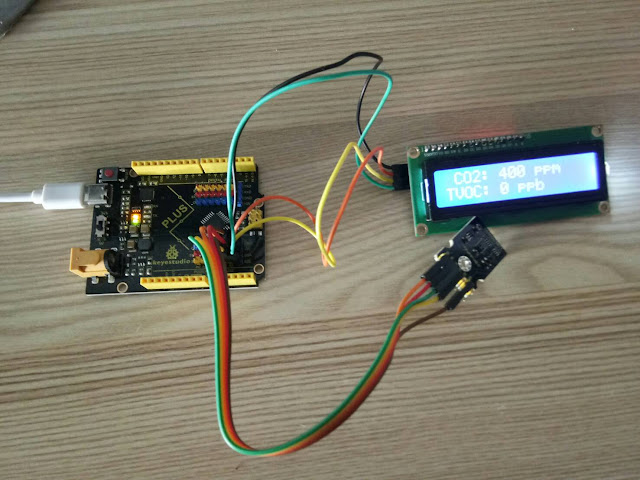
มินิโปรเจค Arduino วัดก๊าซคาร์บอนไดออกไซด์ แสดงผลที่จอ LCD
2 ปีที่ผ่านมา
ระดับคาร์บอนไดออกไซด์ปกติ (Normal CO2 Levels) ระดับคาร์บอนไดออกไซด์ปกติผลกระทบของ CO2 ต่อผู้ใหญ่ที่มีสุขภาพที่ดีสามารถสรุปได้ดังนี้-ระดับกลางแจ้งปกติ: 350 – 450 ppm-ระดับที่ยอมรับได้: <600 ppm=”” span=””>-ข้อร้องเร…
2 ปีที่ผ่านมา
ระดับคาร์บอนไดออกไซด์ปกติ (Normal CO2 Levels) ระดับคาร์บอนไดออกไซด์ปกติผลกระทบของ CO2 ต่อผู้ใหญ่ที่มีสุขภาพที่ดีสามารถสรุปได้ดังนี้-ระดับกลางแจ้งปกติ: 350 – 450 ppm-ระดับที่ยอมรับได้: <600 ppm=”” span=””>-ข้อร้องเร…
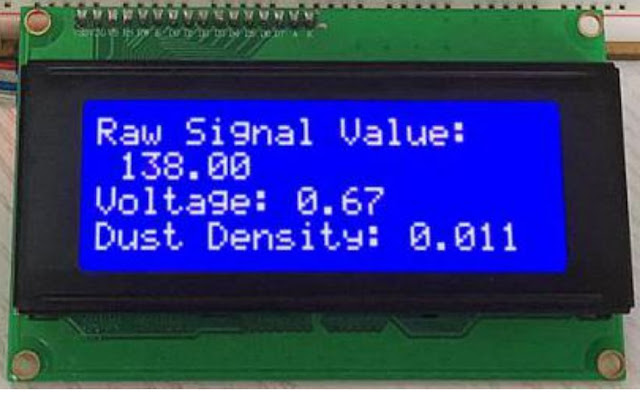
มินิโปรเจค Arduino เครื่องวัดฝุ่น PM2.5 ด้วย เซ็นเซอร์ GP2Y1014AU
3 ปีที่ผ่านมา
เครื่องวัดฝุ่น PM2.5 ด้วย เซ็นเซอร์ GP2Y1014AU บทความนี้ กล่าวถึงขั้นตอนการทำงานโปรเจค เครื่องวัดฝุ่น PM2.5 กับ Arduino UNO โดยใช้ เซ็นเซอร์วัดฝุ่น PM2.5 Keyestudio GP2Y1014AU ของ Sharp เซ็นเซอร์ฝุ่นนี้มีขนาดเล็กและสามารถตรวจจับฝุ่นละอองและอนุภาคควัน…
3 ปีที่ผ่านมา
เครื่องวัดฝุ่น PM2.5 ด้วย เซ็นเซอร์ GP2Y1014AU บทความนี้ กล่าวถึงขั้นตอนการทำงานโปรเจค เครื่องวัดฝุ่น PM2.5 กับ Arduino UNO โดยใช้ เซ็นเซอร์วัดฝุ่น PM2.5 Keyestudio GP2Y1014AU ของ Sharp เซ็นเซอร์ฝุ่นนี้มีขนาดเล็กและสามารถตรวจจับฝุ่นละอองและอนุภาคควัน…
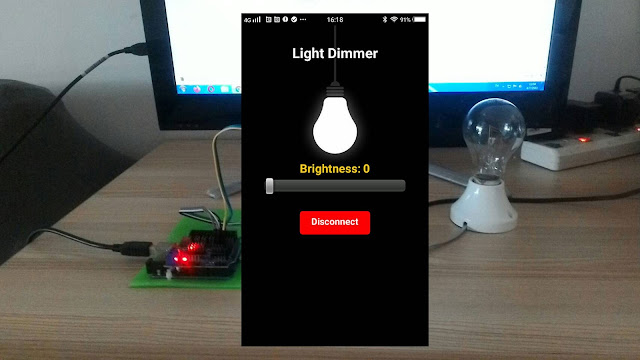
มินิโปรเจค Arduino หรี่ไฟ AC 220V ผ่านบลูทูธ ด้วย App Android
3 ปีที่ผ่านมา
หรี่ไฟ AC 220V ผ่านบลูทูธ ด้วย App Android เป้าหมายและหลักการทำงานของโปรเจค ต้องการหรี่ไฟ หรือควบคุมแสงสว่างของหลอดไฟหรืออุปกรณ์ไฟฟ้าอื่นๆ แบบไร้สายผ่านโทรศัพท์มือถือด้วยแอพแอนดรอยด์ (App Android) เพื่อเป็นการประหยัดพลังงาน และความสะดวกในการควบคุม ซึ…
3 ปีที่ผ่านมา
หรี่ไฟ AC 220V ผ่านบลูทูธ ด้วย App Android เป้าหมายและหลักการทำงานของโปรเจค ต้องการหรี่ไฟ หรือควบคุมแสงสว่างของหลอดไฟหรืออุปกรณ์ไฟฟ้าอื่นๆ แบบไร้สายผ่านโทรศัพท์มือถือด้วยแอพแอนดรอยด์ (App Android) เพื่อเป็นการประหยัดพลังงาน และความสะดวกในการควบคุม ซึ…
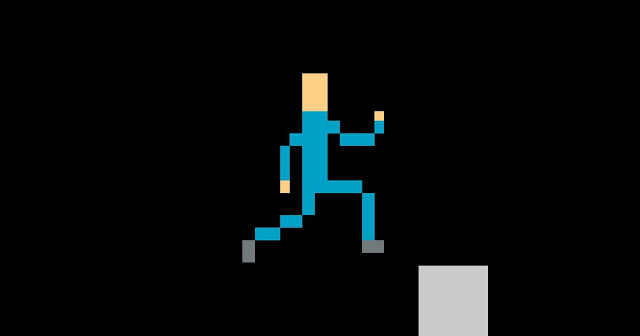
มินิโปรเจค สร้างเกม Endless Runner ด้วย Arduino และ จอ LCD
3 ปีที่ผ่านมา
มินิโปรเจค สร้างเกม Endless Runner ด้วย Arduino และ จอ LCD การสร้างเกม ก็คือการเขียนโปรแกรมแบบหนึ่ง ให้แสดงผลถี่ๆ แล้วเขียนโปรแกรมให้การแสดงผลในแต่ละครั้ง ค่อยๆทำให้ตัวละครในภาพค่อยๆขยับ โดยการทำการเปลี่ยนภาพ หรือเคลื่อนที่ตัวละคร ก็จะเกิดการเคลื่อนไ…
3 ปีที่ผ่านมา
มินิโปรเจค สร้างเกม Endless Runner ด้วย Arduino และ จอ LCD การสร้างเกม ก็คือการเขียนโปรแกรมแบบหนึ่ง ให้แสดงผลถี่ๆ แล้วเขียนโปรแกรมให้การแสดงผลในแต่ละครั้ง ค่อยๆทำให้ตัวละครในภาพค่อยๆขยับ โดยการทำการเปลี่ยนภาพ หรือเคลื่อนที่ตัวละคร ก็จะเกิดการเคลื่อนไ…
โปรเจค IoT ESP8266 วัดอุณหภูมิ บันทึกลงดาต้าเบส MySQL
4 ปีที่ผ่านมา
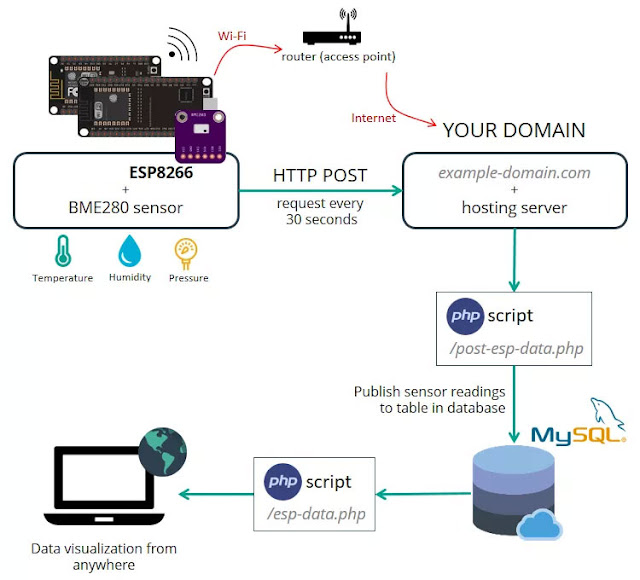
เป้าหมายของโปรเจคนี้คือเราต้องดูข้อมูลด้วยการเข้าถึงโดเมน ของเราเอง ไม่ว่าจะอยู่ส่วนไหนของโลก โดย ESP8266 จะสร้างไคลเอ็นต์ ที่ทำให้คำขอ HTTP POST ไปยังสคริปต์ PHP เพื่อแทรกข้อมูล (การอ่านเซ็นเซอร์) ลงในฐานข้อมูล MySQLโดยบทความนี้จะแสดงการส่งข้อมูลจาก…
4 ปีที่ผ่านมา
เป้าหมายของโปรเจคนี้คือเราต้องดูข้อมูลด้วยการเข้าถึงโดเมน ของเราเอง ไม่ว่าจะอยู่ส่วนไหนของโลก โดย ESP8266 จะสร้างไคลเอ็นต์ ที่ทำให้คำขอ HTTP POST ไปยังสคริปต์ PHP เพื่อแทรกข้อมูล (การอ่านเซ็นเซอร์) ลงในฐานข้อมูล MySQLโดยบทความนี้จะแสดงการส่งข้อมูลจาก…
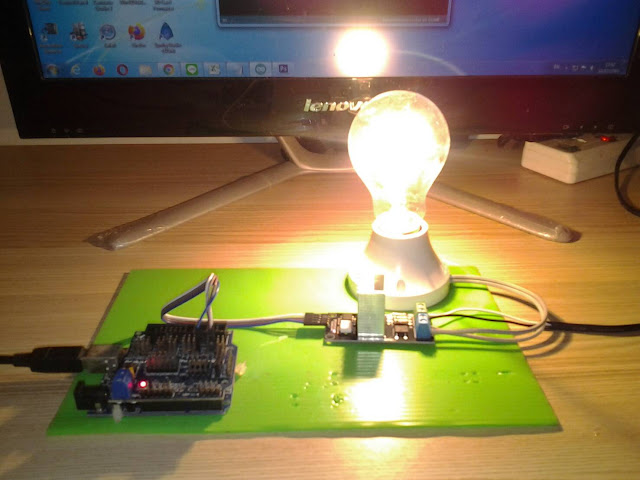
มินิโปรเจค Arduino เปิดปิดไฟ 220V และ หรี่ไฟบ้านด้วยเสียง
4 ปีที่ผ่านมา
มินิโปรเจค Arduino เปิดปิดไฟ 220V และ หรี่ไฟบ้านด้วยเสียง เป้าหมายและหลักการทำงานของโปรเจค ต้องการควบคุม เปิดปิดไฟด้วยเสียง รวมทั้งหรี่ไฟด้วยเสียง เพื่อเป็นการประหยัดพลังงาน และความสะดวกในการควบคุม ซึ่งจะทำให้หลอดไฟกินไฟน้อยลง นอกจากนั้นยังช่วยทำให้ย…
4 ปีที่ผ่านมา
มินิโปรเจค Arduino เปิดปิดไฟ 220V และ หรี่ไฟบ้านด้วยเสียง เป้าหมายและหลักการทำงานของโปรเจค ต้องการควบคุม เปิดปิดไฟด้วยเสียง รวมทั้งหรี่ไฟด้วยเสียง เพื่อเป็นการประหยัดพลังงาน และความสะดวกในการควบคุม ซึ่งจะทำให้หลอดไฟกินไฟน้อยลง นอกจากนั้นยังช่วยทำให้ย…

โปรเจค ESP32-CAM กล้องดักถ่ายภาพอัตโนมัติ ด้วย PIR Motion
4 ปีที่ผ่านมา
โปรเจค ESP32-CAM กล้องดักถ่ายภาพอัตโนมัติ ด้วย PIR Motion โดยโปรเจคนี้ สามารถประยุกต์เป็นกล้องดักถ่ายภาพเมื่อมีผู้บุกรุก หรือเป็นกล้องดักถ่ายภาพสัตว์ มีชื่อเรียกหลายชื่อได้แก่ Trail Cam, Scout Cam, Camera Trap โดยผู้ใช้งานโดยซ่อนไว้ใกล้บริเวณทางที่สั…
4 ปีที่ผ่านมา
โปรเจค ESP32-CAM กล้องดักถ่ายภาพอัตโนมัติ ด้วย PIR Motion โดยโปรเจคนี้ สามารถประยุกต์เป็นกล้องดักถ่ายภาพเมื่อมีผู้บุกรุก หรือเป็นกล้องดักถ่ายภาพสัตว์ มีชื่อเรียกหลายชื่อได้แก่ Trail Cam, Scout Cam, Camera Trap โดยผู้ใช้งานโดยซ่อนไว้ใกล้บริเวณทางที่สั…
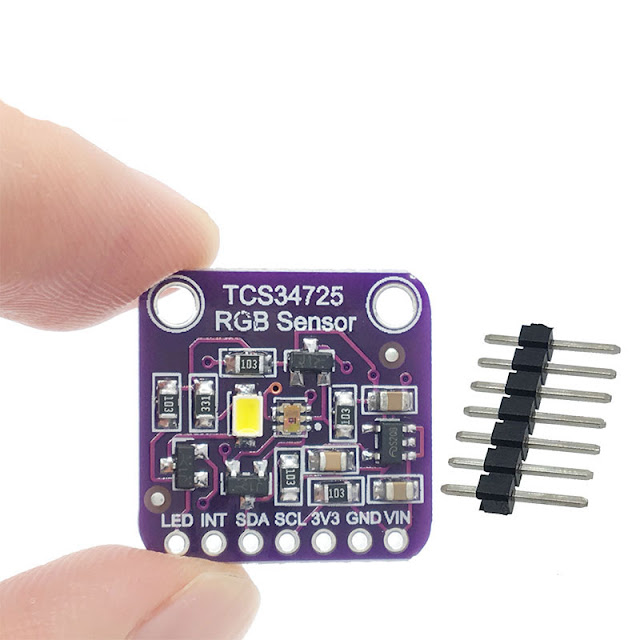
มินิโปรเจค Arduino อ่านค่าสี เล่นไฟล์เสียงจาก SD Card ออกลำโพง
4 ปีที่ผ่านมา
มินิโปรเจค Arduino อ่านค่าสี เล่นไฟล์เสียงจาก SD Card ออกลำโพง โปรเจค Arduino พูดโต้ตอบได้ โดยการเล่นไฟล์เสียงจาก SD Card บทความนี้จะสอนใช้งาน Arduino เล่นไฟล์เสียงจาก SD Card ออกลำโพง เราสามารถอัดเสียงพูดหรือบันทึกเสียงเพลงลง SD Card แล้ว สั่งงานให้…
4 ปีที่ผ่านมา
มินิโปรเจค Arduino อ่านค่าสี เล่นไฟล์เสียงจาก SD Card ออกลำโพง โปรเจค Arduino พูดโต้ตอบได้ โดยการเล่นไฟล์เสียงจาก SD Card บทความนี้จะสอนใช้งาน Arduino เล่นไฟล์เสียงจาก SD Card ออกลำโพง เราสามารถอัดเสียงพูดหรือบันทึกเสียงเพลงลง SD Card แล้ว สั่งงานให้…

โปรเจค IoT ESP32 วัดความชื้นในดิน แจ้งเตือนผ่าน LINE Notify
4 ปีที่ผ่านมา
ESP32 วัดความชื้นในดิน แจ้งเตือนด้วย LINE Notify โดยโปรเจคนี้ สามารถนำประยุกต์ไปใช้ ในสมาร์ทฟาร์มได้ โดยหลักการทำงาน คือ เมื่อเซ็นเซอร์วัดความชื้นในดิน ตรวจสอบค่าข้อมูลความชื้นในดินของพืชที่ปลูกไว้ ถ้ามีค่าเท่ากับหรือมากกว่าค่าที่ตั้งไว้ในตัวอย่าง คื…
4 ปีที่ผ่านมา
ESP32 วัดความชื้นในดิน แจ้งเตือนด้วย LINE Notify โดยโปรเจคนี้ สามารถนำประยุกต์ไปใช้ ในสมาร์ทฟาร์มได้ โดยหลักการทำงาน คือ เมื่อเซ็นเซอร์วัดความชื้นในดิน ตรวจสอบค่าข้อมูลความชื้นในดินของพืชที่ปลูกไว้ ถ้ามีค่าเท่ากับหรือมากกว่าค่าที่ตั้งไว้ในตัวอย่าง คื…

หุ่นยนต์หลบหลีกสิ่งกีดขวาง ESP32 V4 ส่งค่าผ่าน Bluetooth
4 ปีที่ผ่านมา
เซ็นเซอร์วัดระยะทาง สำหรับเซ็นเซอร์วัดระยะทาง สามารถนำไปใช้ในการวัดขนาดสิ่งของ ตรวจจับสิ่งกีดขวางได้ โดยในด้าน Smart Farm มักนำไปใช้วัดระดับน้ำในถังน้ำ หรือนำไปใช้วัดระดับน้ำในบ่อน้ำ เพื่อให้แจ้งเตือน หรือเติมนำอัตโนมัติ สำหรับเซ็นเซอร์วัดระยะห่างจะม…
4 ปีที่ผ่านมา
เซ็นเซอร์วัดระยะทาง สำหรับเซ็นเซอร์วัดระยะทาง สามารถนำไปใช้ในการวัดขนาดสิ่งของ ตรวจจับสิ่งกีดขวางได้ โดยในด้าน Smart Farm มักนำไปใช้วัดระดับน้ำในถังน้ำ หรือนำไปใช้วัดระดับน้ำในบ่อน้ำ เพื่อให้แจ้งเตือน หรือเติมนำอัตโนมัติ สำหรับเซ็นเซอร์วัดระยะห่างจะม…
 โรบอทสยาม อุปกรณ์หุ่นยนต์ Arduino
โรบอทสยาม อุปกรณ์หุ่นยนต์ Arduino
สมัครสมาชิกร้านนี้ เพื่อรับสิทธิพิเศษ



▲
▼
รายการสั่งซื้อของฉัน
รายการสั่งซื้อของฉัน
ข้อมูลร้านค้านี้

โรบอทสยาม อุปกรณ์หุ่นยนต์ Arduino
จําหน่าย อุปกรณ์หุ่นยนต์ Arduino , ESP8266, ESP32 , STM32 , micro:bit , Paspberry Pi รับประกอบหุ่นยนต์ ชุดคิทหุ่นยนต์ ตัวอย่างโปรเจค IoT (Internet of Things) อินเทอร์เน็ตของสรรพสิ่ง
เบอร์โทร : 095-226-2116
อีเมล : robotsiam16@gmail.com
อีเมล : robotsiam16@gmail.com
ส่งข้อความติดต่อร้าน
เกี่ยวกับร้านค้านี้
ค้นหาสินค้าในร้านนี้
ค้นหาสินค้า
สินค้าที่ดูล่าสุด
บันทึกเป็นร้านโปรด
Join เป็นสมาชิกร้าน
แชร์หน้านี้
แชร์หน้านี้
↑
TOP เลื่อนขึ้นบนสุด
TOP เลื่อนขึ้นบนสุด
สินค้าในตะกร้า ({{total_num}} รายการ)

ขออภัย ขณะนี้ยังไม่มีสินค้าในตะกร้า
ราคาสินค้าทั้งหมด
฿ {{number_format(total_price,2)}}
- ฿ {{number_format(discount.price,2)}}
ราคาสินค้าทั้งหมด
{{total_quantity}} ชิ้น
฿ {{number_format(after_product_price,2)}}
ราคาไม่รวมค่าจัดส่ง
➜ เลือกซื้อสินค้าเพิ่ม